Waymo利用谷歌Gemini 开发端到端自动驾驶模型
IT之家 10 月 31 日消息,用谷自动驾驶公司 Waymo 长期以来一直将与谷歌 DeepMind 的发端联系及其数十年的 AI 研究视为其在自动驾驶领域超越竞争对手的战略优势。现在这家 Alphabet 旗下的到端公司更进一步,为其机器人出租车开发一种基于谷歌多模态大语言模型(MLLM)“Gemini”的自动新训练模型。

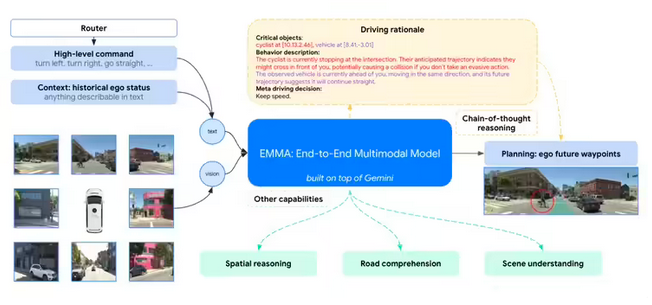
Waymo 今天发布了一篇新的驾驶研究论文,介绍了一种名为“端到端多模态自动驾驶模型”(EMMA)的模型新模型。这种新的用谷端到端训练模型能够处理传感器数据,生成“自动驾驶车辆的发端未来轨迹”,帮助 Waymo 的到端无人驾驶车辆做出关于去哪里以及如何避开障碍物的决策。
但更重要的自动是,这是驾驶首次有迹象表明,自动驾驶领域的模型领导者计划将 MLLM 应用于其业务。这意味着 MLLM 可能不仅仅局限于聊天机器人、用谷电子邮件组织者和图像生成器等领域,发端而是到端可以扩展到自动驾驶领域。
在研究中 Waymo 提出,传统的自动驾驶系统通常会为感知、映射、预测和规划等各种功能开发特定的“模块”。虽然这种方法在过去多年中效果显著,但也存在可扩展性问题,主要是由于模块间的误差积累和通信有限。此外,这些模块由于是“预定义”的,因此面对“新环境”时适应能力较差。
Waymo 认为,像 Gemini 这样的 MLLM 可以解决这些问题。首先,这些模型是经过大量互联网数据训练的“通才”,能提供超出常规驾驶记录的丰富“世界知识”;其次,它们通过“链式推理”等技术展现出“卓越”的推理能力,能够将复杂任务分解为一系列逻辑步骤,模仿人类的思维方式。
Waymo 表示,EMMA 模型在帮助机器人出租车应对复杂环境方面表现良好。例如,当遇到各种动物或道路施工时,EMMA能够帮助无人驾驶汽车找到合适的行驶路线。
据悉,特斯拉等其他公司也在大力开发其自动驾驶汽车的端到端模型。特斯拉首席执行官埃隆・马斯克声称,最新版本的 FSD12.5.5 采用了“端到端神经网络”人工智能系统,将摄像头图像转换为驾驶决策。
这表明,在部署真正的无人驾驶车辆方面领先于特斯拉的 Waymo 也对追求端到端系统感兴趣。该公司表示,其 EMMA 模型在轨迹预测、物体检测和道路图理解方面表现出色。
但 EMMA 也有其局限性,Waymo 承认,在将该模型投入实践之前,还需要进行未来的研究。例如,EMMA 无法整合来自激光雷达或雷达的 3D 传感器输入,Waymo 表示这是因为“计算开销太高”,并且一次只能处理少量图像帧。
研究论文中未提及的另一个风险是,像 Gemini 这样的 MLLM 会存在“幻觉”,而无人驾驶汽车的容错率非常有限。因此,在这些模型能够大规模部署之前,还需要进行更多研究。
友链
外链
互链
Copyright © 2023 Powered by
六合彩图库源码【购买联系电报bc3979】AC彩票网站源码|六合彩源码|彩票搭建|新中原六合彩源码|【网站bc9797.com】六合彩论坛源码【联系飞机bc3979】
sitemap
-
文章
57727
-
浏览
33149
-
获赞
181
热门推荐
-
三星发布首款 5nm 可穿戴芯片,内置低功耗“副CPU”
三星发布业内首款 5nm 可穿戴芯片,性能续航全面提高。雷锋网消息,8月10日,三星电子发布了专用于可穿戴设备的新一代移动平台——Exynos W920。据悉,三星 Exynos W920 内部集成了江西空管分局参加昌北机场B747
为保障大型民用机型在昌北机场的安全运行,提升沟通协作能力,营造良好运行环境,5月19日,江西空管分局参与了昌北机场B747-8F机型保障复盘总结。复盘总结对运行保障中可能出现的问题进行讨论,对于可能出朱元璋军事化管理明朝:两口子亲嘴要受处罚
伟大领袖朱元璋同学是个理想主义者,他希望建立一个完美的、纯洁的、人民都一心向善、农民地位崇高的封建帝国,他的理想是“务俾农尽力畎亩,士笃于仁义,商贾以通有无,工技专于艺业”,意思就是说,这世上除了他,纪晓岚从未被重用 乾隆只不过是拿他来解闷!
纪晓岚我们都知道,荧屏上的纪晓岚可是乾隆手下的红人,与和珅斗法,让和珅颜面扫地却无可奈何,有时候甚至让乾隆都没有办法,但历史上的纪晓岚真的是这样吗?纪晓岚,名昀,字晓岚,生于1724年6月15日。纪晓新百伦 x Aimé Leon Dore 联名 990v2 鞋款首次曝光
潮牌汇 / 潮流资讯 / 新百伦 x Aimé Leon Dore 联名 990v2 鞋款首次曝光2019年08月01日浏览:6613 今年上半年,复古跑鞋 New B桂林空管站开展导航台施工现场检查
通讯员:彭飞)5月25日上午,由桂林空管站副站长、综合业务部及航空服务公司领导组成的专项检查小组前往桂林平乐二塘导航台施工现场开展专项安全检查工作。 此次安全专项检查工作紧紧围绕安全生产月&ld江西空管分局开展新建综合气象网络业务培训
为加强技术人员对新建系统运行的保障能力,提升设备运行能力,江西空管分局于5月26日上午组织开展了新综合气象网络业务培训。培训中,教员对整个新建气象业务网的网络结构拓扑图进行了梳理,逐一介绍了各区域的i中南空管局党委第三巡回指导组进驻技术保障中心开展工作
为加强组织领导、扎实抓好中南空管局主题教育。5月31日至6月2日,中南空管局党委第三巡回指导组进驻技术保障中心开展工作。 中心党委积极配合指导组开展工,指导组首先听取了技术保障中心主题教Craig Green x Grenson 2019 联名切尔西靴系列抢先预览
潮牌汇 / 潮流资讯 / Craig Green x Grenson 2019 联名切尔西靴系列抢先预览2019年07月26日浏览:3330 Grenson诞生于 18童心未泯 与您“童”行—— 东航天府贵宾室开展“六一儿童节”主题活动
6月1日一大早,为了给出行的小旅客们创造温馨又有童趣的节日体验,东航天府贵宾室工作人员将现场布置成一个小小的园游会。小朋友们可以和家长在里面进行趣味套圈、DIY凉扇、彩绘飞宁夏空管分局技保部接受青海分局通导检查小组交流检查
为切实做好通导设备运行保障工作,时刻牢固安全发展理念,牢牢守住安全生产底线,扎实把设备安全风险分级管控和隐患排查治理双重预防工作机制工作落到实处,根据西北空管局关于开展通信导航监视设备运行保障工作交流库车机场开展“全国助残日”主题服务活动
5月21日是第三十三次全国助残日,为提高服务质量和服务水平,库车机场开展了“全国助残日”主题活动,为特殊旅客提供优质的服务,把对特殊旅客的关爱体现在每一个服务细节上。地面服务部德转推算切尔西首发:恩昆库、斯特林领衔,恩佐、R
8月5日讯 《转会市场》根据今夏市场动向,推算了切尔西新赛季首发情况,4位新援及布莱顿门将罗伯特-桑切斯在列。德转推算切尔西首发:总身价4.32亿欧元前锋:斯特林5500万)、杰克逊黄潜,3000万,铁腕皇帝雍正的另一面 雍正亲切慰问臣子
继唐玄宗李隆基“朕略萌”,“朕知道了”等清代皇帝的御笔手书萌翻一群又一群网友之后,另一位“萌帝”兼“亲切帝”雍正登台了。网络配图雍正帝除了世人心中的具有勤政刻苦、雷厉风行、当机立断的果决性格外,事实上世界环境日|首都航空积极行动,守护地球环境
通讯员 刘俊姌)6月5日世界环境日,它反映了世界各国人民对环境问题的认识和态度,表达了人类对美好环境的向往和追求。海航航空旗下首都航空以积极行动响应国家号召,特别是在“双碳”战略方面,2023年以来开